AND-DINS Dynamically Tuned Inertial Navigation System
Introdução
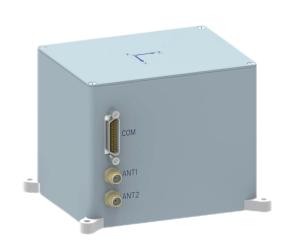
Sintonizado dinamicamente Sistema de navegação inercial consiste em uma unidade de medição inercial, sensor de cabeçalho magnético e controlar a tela, a antena de recebimento de satélite, o radar doppler e o componente do suporte de instalação. A antena recebida por satélite pode ser personalizada de acordo com as necessidades de BD2 /GPS/GLONASS antena de recepção tripla ou antena anti-interferência BD2. A unidade de medição inercial também pode ser uma forma separada de unidade de medição inercial, para todos os tipos de sistema de controle de vôo de mísseis e sistema de orientação.
O sistema de navegação inercial de Strapdown determina a posição da aeronave, o título, a altitude, a aceleração. Como navegação da aeronave, ele determina o controle de vôo, o gerenciamento de rota e fornece localização, velocidade, atitude e informações sobre o título. O sistema de navegação inercial ajustado dinamicamente possui alinhamento rápido de emergência, alinhamento normal, navegação, correção, calibração de parâmetros, teste, ligação de parâmetros e armazenamento não volátil.