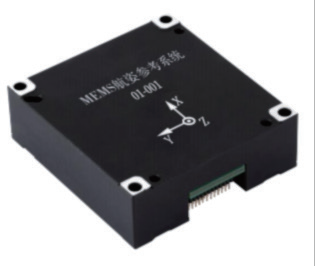
The product consists of MEMS inertial measurement unit, together with the heading attitude a lgorithm and complementary filtering algorithm with completely independent intellectual property rights. By measuring the three-axis angular velocity and three-axis linear acceleration of the carrie r and calculating the pitch angle, roll angle and relative heading angle information, the product can output stable and reliable attitude information under dynamic environment.