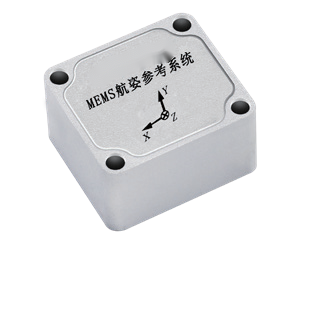
Das Produkt besteht aus einer MEMS-Trägheitsmesseinheit, einem Kurs-Lage-Algorithmus und einem komplementären Filteralgorithmus mit unabhängigen Schutzrechten. Das System nutzt die Technologie zur Kompensation von Temperaturfehlern der MEMS-Bauelemente und den komplementären Filteralgorithmus, wodurch die Lagegenauigkeit langfristig aufrechterhalten und auch unter dynamischen Bedingungen stabile und zuverlässige Kurs-Lageinformationen ausgegeben werden können.